
Go 内存管理设计与实现
Go 内存管理设计与实现
概述
在冯·诺伊曼的设计理念的指导下,计算机将计算与存储这个两大核心模块进行分离,二者通过总线连接,协调工作:
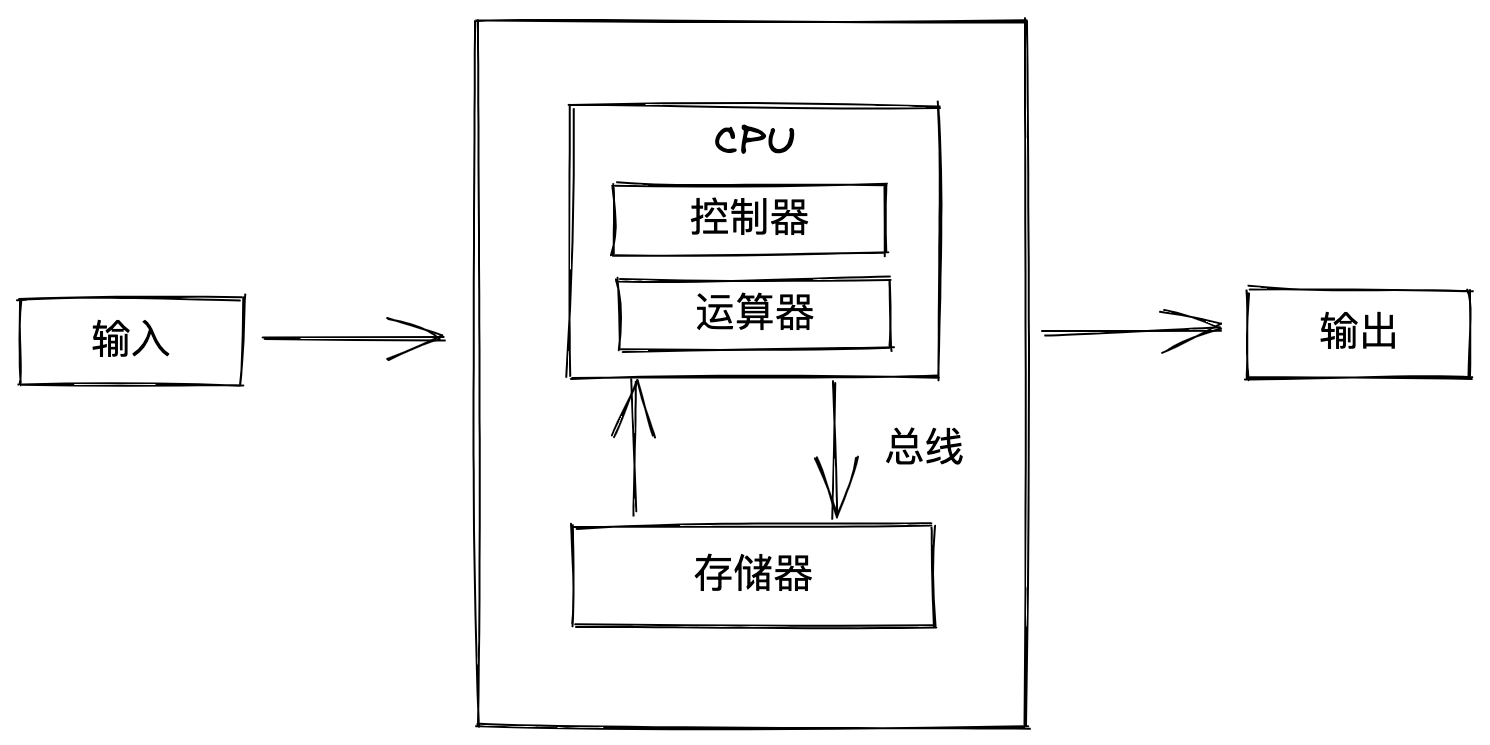
对于计算而言,CPU 无疑是核心(CPU 内部结构无需过多关注),但对于存储而言,则要麻烦的多。
带来这个麻烦的主要因素在于:CPU 与存储设备之间巨大的速度差异。
以 CPU 的指令周期为单位,如果数据在高速缓存中,那么 CPU 访问到数据只需 4 ~ 75 个周期,如果在内存中,则需要上百个周期,而如果在磁盘中,那么就需要几千万个周期。
存储设备类型的不同也会带来存储性能巨大的差异,比如 SRAM(Static Random-Access Memory)存储设备性能很高,被用来作为 CPU 的高速缓存,CPU 访问它们只需几个时钟周期,而 DRAM(Dynamic Random-Access Memory)被用做主存(内存),CPU 访问它们需要上百个周期;而磁盘存储被用来保存大量数据,磁盘读比 SRAM 慢了足足 100 万倍。
即使速度差距如此之大,计算机的主要存储设备仍然是 DRAM(内存)和磁盘(或者 SSD)。
这是因为,SRAM 虽然性能强劲,却也十分昂贵,CPU 旁边的高速缓存容量一般也就几百 KB,或者几 MB。它们之间的速度差异可以用存储器山来直观的展示:
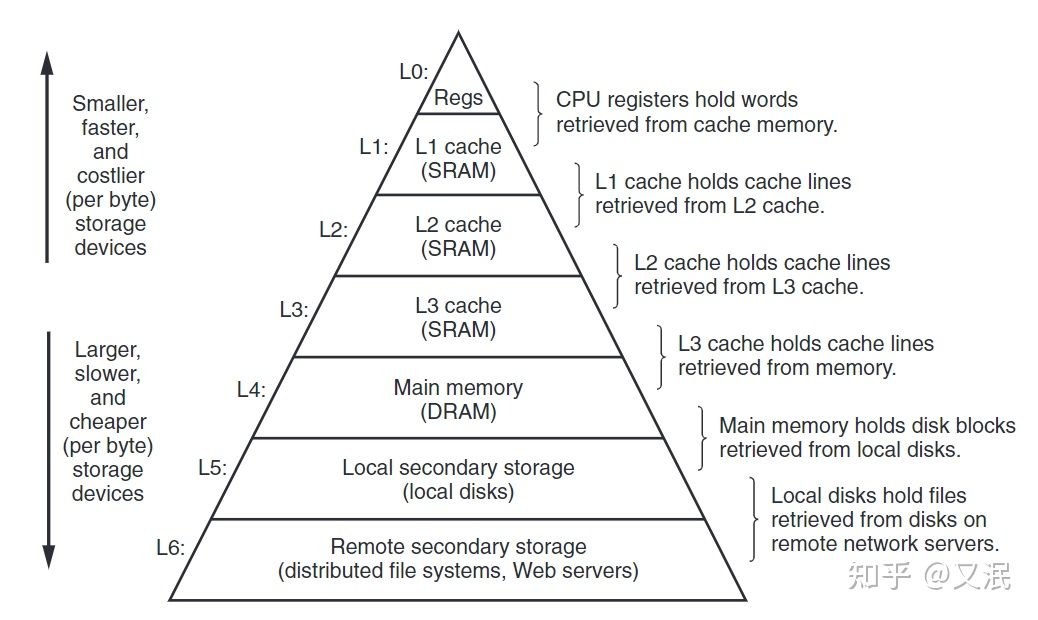
计算机往往是多种存储设备共存,相互协助让 CPU 充分发挥其性能。而内存(Main Memory,也称主存)作为山中最核心的一层,担任着缓冲与加速的重要工作,其重要性不言而喻。
也因此,内存管理 模块是操作系统、编程语言中极为重要且不可或缺的一部分。
操作系统对内存的抽象和管理是很复杂的,里面涉及到大量概念和机制
(比如虚拟内存、分页、权限、缺页中断等等),不熟悉的同学
可以点击这里回顾一下。 编程语言工作在操作系统之上,所管理的内存在进程地址空间上,因此笔者
不会介绍地址空间之下的内容。
内存布局
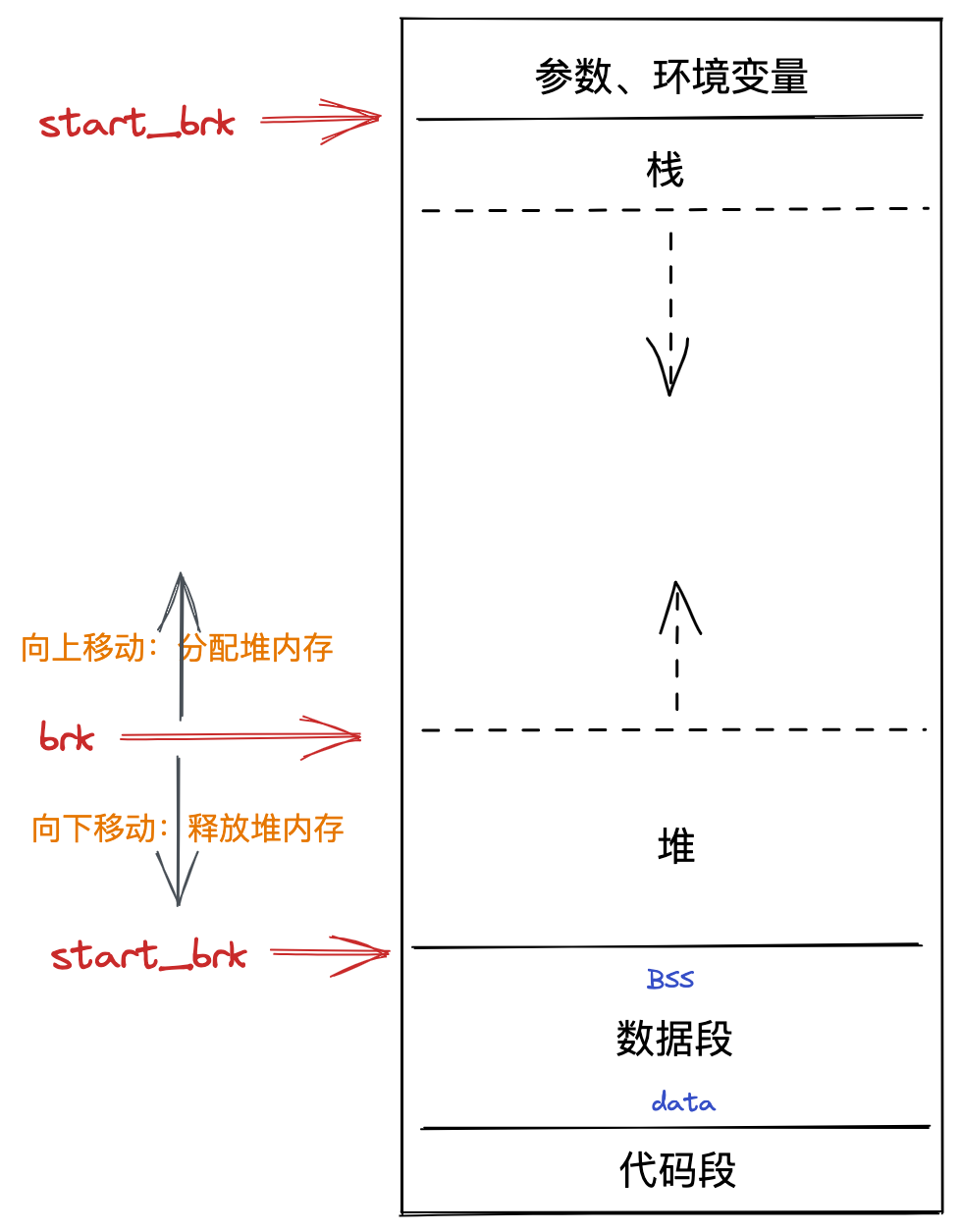
对于一个程序而言,当其以进程的形式被创建时,操作系统会为其分配一片巨大的虚拟内存,被称为地址空间。如下:
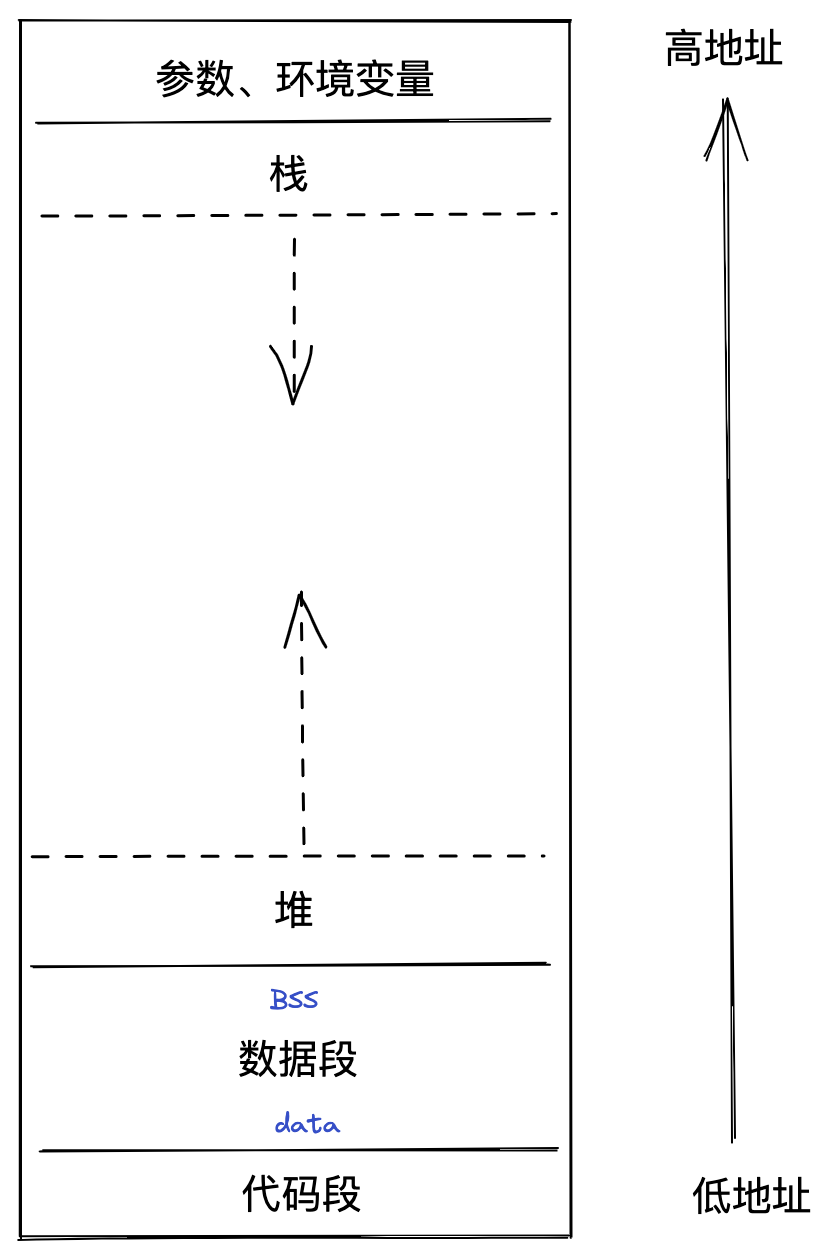
如图所示,内存空间被划分为了多个区:
- 栈区(Stack):存储执行期间的局部变量、参数等,从高地址向地址增长;
- 堆区(Heap):动态内存分配区,也是内存管理的主战场;
- 数据区(BSS、Data):数据区可以划分为两个部分,BSS 表示存储但未被初始化的全局变量和静态变量,而 Data 区表示已经初始化完毕的全局、静态变量;
- 代码区(Text):存储只读的机器指令。
按照这些区各自的特点,代码区的指令会自动根据 PC 寄存器的值加载至 CPU 并运行,栈区用于保存局部变量、参数,内存会自动随着函数调用而开辟和释放,数据区的内存由于是全局、静态变量,因此也不会被释放调,它们在程序启动的时候就已经被分配了,在整个程序的生命周期中一直存在。
而剩下的堆区则是程序内存管理的最主要战场了,事实上堆内存也占据了地址空间上最大的一块。堆内存具有如下特点:
- 生命周期灵活,由用户程序自己管理;
- 大小可变,可按块分配大内存,也可按字节分配小内存;
- 按需分配,由 sbrk 指针管理,指针上移则开辟内存,下移则释放内存;
堆内存虽然灵活,但同时也带来了一些问题:
- 如果开辟的内存未使用,但也未释放,就会造成内存泄漏;
- 如果开辟的内存仍在使用,但被释放了,就会造成悬挂指针。
这些内存问题也一直困扰着 C/C++程序员们,尤其是初学者。
管理方式
既然内存管理如此重要,因此几乎所有编程语言都将内存管理内置到了语言中,而它们的管理方式可以分为两大类:
- 手动管理:如 C 中 malloc/free 函数分别用来开辟、释放内存;
- 自动管理:如 Java、Go、Python 等内置了垃圾回收器(GC)来追踪内存使用,自动释放未用的内存(垃圾)。
手动管理
手动内存管理应该算是内存管理的经典流派了,其核心思想是充分信任程序员,待程序需要更多内存时,通过 malloc(或者 new) 函数来开辟内存,当内存不再需要的时候,调用 free(或者 delete) 函数来释放。
理想情况下,一个高素质的工程师不仅能合理完成业务需求,还要对程序内存使用做到精准管理,这样内存不仅能够得到完善的管理,也不会造成内存安全问题。
C/C++ 是手动内存管理语言的代表,举个简单的例子:
int main(int argc, char const *argv[])
{
// 开辟内存
int *a = (int *)malloc(sizeof(int));
*a = 1;
printf("%d\n", *a);
// 用完后释放
free(a);
return 0;
}
// output:
// 1
在这个简单的 C 语言例子中,开发者必须手动调用 malloc 来为变量 a 分配内存,待使用完后,又需要手动调用 free 将内存还给进程。
试想一下,对于少量的变量,精准控制它们的分配与释放是较为简单的,可是一旦代码量急剧攀升,变量也极具攀升,而人的精力总是有限的,难免会出现错误导致内存问题。
而且很多时候,为了性能考虑,开发者还需抉择内存是在堆上分配,还是栈上分配,如此机械的开辟、释放工作无疑会占开发者很多的时间和精力。
C++为了改善一点,引入了构造、析构函数,智能指针(本质上是引用计数)来改善内存的自动管理,一些 C++的拥趸者觉得这已经够了,但更多的人觉得这不够,因此他们引入了纯自动内存管理的编程语言。
自动管理
自动内存管理几乎是现代语言的标准,第一个使用内存自动管理的语言是 Lisp,它的作者 John 为其实现了一个非常简单的 GC(Garbage Collection)算法,被称为标记清理算法(Mark-Sweep)。
这个算法管理内存的思路很简单:
- 标记:实时追踪程序变量,标记出可达对象;
- 清理:标记完成后,未标记的对象都是不可达的,可以作为垃圾清理掉。
这个算法思路虽然简单,但至今仍在使用,是学习 GC 算法的必经之路。当然 GC 算法还有很多,每个语言的实现不尽相同,后文我们再来细谈。
内存从手动管理到自动管理是语言的一大步,这种机制彻底解放了开发者们,并且让普通人开始着手写代码,体验创造的乐趣。此后,工程师只需将精力集中在核心的业务逻辑上,无疑这提升了开发效率。
但好东西都是有代价的,内存自动管理虽然帮助开发者节约了时间和精力,解决了基本的内存问题,但同时也带来了一定量的性能损害,这其中就有最臭名昭举的 STW(Stop The World)问题。
内存管理
在对内存、内存布局、内存管理简单介绍后,我们进入真正的正文部分:用 Go 来实现内存管理。
肯定很多人觉得 Go 是一门自带 GC 的语言,有必要再去管理其内存吗?
理论上来说,是不需要的,但最近一段时间笔者分别看到了三篇文章,它们不约而同地指向了一件事情:Go 的 GC 不稳定,我们需要另外的内存管理方式。
这三篇文章分别是:
2019 年 Ross 在 twitch 上发表了一篇名为Go memory ballast: How I learnt to stop worrying and love the heap的文章;Ross 提出了一种 ballast 的内存管理方式,显著地降低了 GC 带来的延时。
2022 年 2 月,danscales 在 Go 的官方 Github 仓库上提出了一个名为proposal: arena: new package providing memory arenas的提案,这个提案希望 Go 能提供一种手动内存管理的 Area API。
同样在 2022 年 2 月,heiyeluren 在 Github 上开源了一个名为XMM的 Go 三方内存管理库,旨在完美逃逸掉 Go 的内存 GC 机制,构建高性能基础设施。
受这 3 篇文章的启发,以及抱着对内存管理的兴趣,笔者决定在 Go 上分别实现手动、自动内存管理两种方式,以此为契机来深入理解 Go 的内存管理。
内存分配原理
在前面的内存布局中,我们了解到内存管理的最主要模块是堆内存。由于是虚拟内存,这个堆非常大,现阶段几乎不可能用完,因此暂时无需考虑堆越界的问题。
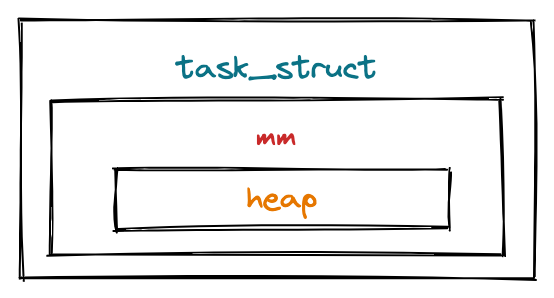
堆(heap)存在于进程地址空间中,而进程地址空间(mm)又被定义在进程(task_struct)中,它们之间的关系如下所示:
在代码层面上,以 Linux 操作系统为例,它们之间的定义如下:
struct task_struct {
// ...
struct thread_info thread_info; // 处理器特有数据
// ...
struct mm_struct *mm; // 指向进程内存结构
// ...
};
struct mm_struct {
// ...
// 进程应用程序堆区的开始、当前地址、栈开始地址
unsigned long start_brk, brk, start_stack;
// 进程应用程序参数区开始、结束地址
unsigned long arg_start, arg_end, env_start, env_end;
// ...
};
代码里,笔者已经注释了与堆相关的两个变量,分别是:
- start_brk:堆开始地址;
- brk:堆当前地址。
以进程的视角来看,管理堆其实就是移动 brk 这个地址指针,start_brk 在创建后就不会改变;brk 指针增加,表示分配堆内存,brk 指针减少,则会释放堆内存。如下:
以应用程序的视角来看,管理内存的本质实质就是通过进程提供的 API 来移动 brk 指针,而这个 API 就是著名的 BRK API:
BRK(2)
NAME
brk, sbrk - change data segment size
SYNOPSIS
#include <unistd.h>
int brk(void *addr);
void *sbrk(intptr_t increment);
以函数 sbrk 为例,其接收一个参数 increment,当 increment 大于 0 时,则将 brk 指针向上移动,小于 0 时,则向下移动,调用成功后返回分配地址的内存,调用失败则返回 -1。
我们来实操一下,看 sbrk 是否能真的分配内存,如下:
/*
#include <stdio.h>
#include <unistd.h>
static void* Sbrk(int size) {
void *r = sbrk(size);
if(r == (void *)-1){
return NULL;
}
return r;
}
*/
import "C"
// ... 省略
func main() {
mem := C.Sbrk(C.int(100))
fmt.Println(mem)
}
运行程序,会得到以下输出(得到的内存地址可能不同):
0xba00000
这说明,sbrk 确实真正的向进程申请到了内存,而这个内存是可以直接读写的。
除了这种方式,操作系统还提供另外的一种系统调用 mmap 也能达到申请堆内存的效果:
NAME
mmap, munmap - map or unmap files or devices into memory
SYNOPSIS
#include <sys/mman.h>
void *mmap(void *addr, size_t length, int prot, int flags,
int fd, off_t offset);
int munmap(void *addr, size_t length);
当然,mmap 的实现机制与 sbrk 有很大的不同,而且用途更多,简单而言,它会映射堆中的一块内存供程序操纵,这块内存大小由参数控制,因此可以提前申请一大块内存,然后用这块内存来用于程序其它数据的分配。
mmap 的内容比较多,本文的重点是简单使用它,因此关于它的其它用法,或者实现机制可以参考这里。
另外无论是 sbrk 还是 mmap 看似都从堆里面分配了内存,但实际上这些都是虚拟内存,而当程序使用内存时,物理内存才会真正的分配,这种懒加载的机制被称为缺页中断(demand paging),感兴趣的同学可以查看相关的资料。
事实上,我们在 C 中使用的 malloc/free 两个函数内部的都是通过调用 sbrk,mmap 等 API 来分配、释放内存的。
另外,对于 C 而言,标准库提供的 malloc/free API 是由 glibc 实现的,而内存分配显然是一个很棘手的问题,不同的场景下有不同的分配算法实现,比如另外两个比较知名的实现:jemalloc和tcmalloc。它们各有优缺点,感兴趣的同学可以点开看看。
GC 实践
在 Go 程序中,我们几乎不用关注内存管理,runtime(运行时)会为程序接管进程内存,当需要内存分配对象时,直接新建对象即可,当对象不再使用时,会被自动回收掉(GC) 。
举个例子:
func main() {
PrintMemUsage()
pid := os.Getpid()
fmt.Printf("process: %d\n", pid)
time.Sleep(time.Second * 1)
var overall [][]byte
for i := 0; i < 4; i++ {
a := make([]byte, 0, 1024*1024*50)
overall = append(overall, a)
PrintMemUsage()
time.Sleep(time.Second)
}
overall = nil
PrintMemUsage()
runtime.GC()
PrintMemUsage()
}
// PrintMemUsage 输出当前程序内存情况
func PrintMemUsage() {
var m runtime.MemStats
runtime.ReadMemStats(&m)
// For info on each, see: https://golang.org/pkg/runtime/#MemStats
fmt.Printf("Alloc = %v MiB", bToMb(m.Alloc))
fmt.Printf("\tTotalAlloc = %v MiB", bToMb(m.TotalAlloc))
fmt.Printf("\tSys = %v MiB", bToMb(m.Sys))
fmt.Printf("\tNumGC = %v\n", m.NumGC)
}
func bToMb(b uint64) uint64 {
return b / 1024 / 1024
}
运行该程序,会得到如下输出:
Alloc = 0 MiB TotalAlloc = 0 MiB Sys = 8 MiB NumGC = 0
process: 1855
Alloc = 50 MiB TotalAlloc = 50 MiB Sys = 60 MiB NumGC = 1
Alloc = 100 MiB TotalAlloc = 100 MiB Sys = 114 MiB NumGC = 2
Alloc = 150 MiB TotalAlloc = 150 MiB Sys = 168 MiB NumGC = 2
Alloc = 200 MiB TotalAlloc = 200 MiB Sys = 222 MiB NumGC = 2
Alloc = 200 MiB TotalAlloc = 200 MiB Sys = 223 MiB NumGC = 3
Alloc = 0 MiB TotalAlloc = 200 MiB Sys = 223 MiB NumGC = 4
代码第 8 行,通过 make 关键字大量分配内存,每次 50M,共 4 次; 代码第 13 行,当对象不再被需要时,直接置为 nil 即可;注意:通过此时的输出发现,200M 内存仍然占用,而在最后的一行输出中,被分配的内存瞬间回到了 0M。 原因在于,代码的第 15 行,调用了 runtime 提供的 GC 函数,回收掉了不需要的垃圾对象。
通过这个例子,我们已经见识到了 GC 的强大能力,而在真实的场景中,应用程序是不用手动调用 GC 的(这里之所以调用,是为了展示),runtime 会自动监测内存使用情况,然后在合适的时机自动 GC。
这样,自动内存管理的好处就显现出来了,写代码时无需关注内存的回收问题,也不会产生内存的安全问题,将全部精力和时间放在核心业务上,自然就能提高代码、项目质量,也能让程序员朝九晚五的工作(梦想还是要有的)。
但这个例子也暴露出 GC 的一个问题:overall 被置为 nil 后,显然此时它被分配的 200M 内存就已经是垃圾,但 runtime 并没有立即回收,因此这里才手动调用了 GC 函数来回收垃圾。而真实的场景远比这复杂,可能有大量的垃圾没有及时回收,但它们仍然占用了内存,这样内存资源就被浪费了。
更棘手的是,即使 runtime 发现了大量垃圾,比如 200M,但是回收垃圾也是需要时间的,而此时程序仍然运行,仍有可能在分配新的对象,这样边回收边开辟会非常复杂。因此,runtime 会选择暂停程序运行,回收掉垃圾后再恢复,而这个暂停就是上文谈到的 STW;直观上,STW 的时间越少肯定越好,如果 STW 时,仍有大量用户请求,那么服务就无法服务用户。这也是为什么Go memory ballast: How I learnt to stop worrying and love the heap这文章的作者要提出 Go memory ballast 来降低 GC 时延的原因。
那么,有没有一种方式能让内存逃开 GC 的限制?从而减少 STM 的发生。
无疑,是有的。Go memory ballast 就是其中的一种方式,而且它的原理很简单,如下:
func main() {
big := make([]byte, 1024*1024*200)
runtime.KeepAlive(big)
}
Go memory ballast 会预先分配一大块内存,如这里的 200M,然后调用 runtime.KeepAlive 函数,这样 runtime 会一直认为 big 这段内存是存活的,不会尝试去回收它。从此,我们就能在程序中接管 big 这段内存,并且按需使用,且无需被 GC 掉,从而减少 STM 的发生频率,这种方式也被 TiDB 用在了生产环境上。
除此之外,还有一种更加彻底的方式来逃开 GC,有了上面的进程内存管理的铺垫,这不难想到,那就是直接通过 mmap 系统调用向进程要内存,绕开 runtime 这一层。如下:
func main() {
PrintMemUsage()
pid := os.Getpid()
fmt.Printf("process: %d\n", pid)
time.Sleep(time.Second * 1)
var overall []*Area
// 1216 KB
for i := 0; i < 5; i++ {
area, err := Init(1024 * 1024 * 50)
if err != nil {
log.Fatalln(err)
}
overall = append(overall, area)
PrintMemUsage()
}
runtime.GC()
PrintMemUsage()
}
这里,我们不再通过 make 函数来向 runtime 中申请内存,而是使用 mmap 申请内存,将其包装为 Area 返回:
type Area struct {
addr uintptr // 首地址
mem []byte // 内存
size int // 内存大小
allocated int // 已分配内存
blocks int // 内存块个数
}
// 通过 mmap 来分配内存
func Init(size int) (*Area, error) {
mem, err := syscall.Mmap(-1, 0, size,
syscall.PROT_READ|syscall.PROT_WRITE,
syscall.MAP_ANON|syscall.MAP_PRIVATE)
if err != nil {
return nil, fmt.Errorf("mmap err: %s", err)
}
addr := unsafe.Pointer(&mem[0])
hdr := (*header)(addr)
hdr.size = size - headerSize
m := &Area{
addr: uintptr(addr),
mem: mem,
size: size,
allocated: 0,
blocks: 0,
}
return m, nil
}
运行程序,输出如下:
Alloc = 0 MiB TotalAlloc = 0 MiB Sys = 8 MiB NumGC = 0
process: 19282
Alloc = 0 MiB TotalAlloc = 0 MiB Sys = 8 MiB NumGC = 0
Alloc = 0 MiB TotalAlloc = 0 MiB Sys = 8 MiB NumGC = 0
Alloc = 0 MiB TotalAlloc = 0 MiB Sys = 8 MiB NumGC = 0
Alloc = 0 MiB TotalAlloc = 0 MiB Sys = 8 MiB NumGC = 0
Alloc = 0 MiB TotalAlloc = 0 MiB Sys = 8 MiB NumGC = 0
我们发现,无论怎么调用 mmap 函数分配内存,但 runtime 打印的内存指标一直为 0,而且没有触发任何 GC,即使手动去调用 GC,但 GC 也没有真正的发生。
这也映证了刚才谈到的,mmap 绕开了 runtime 这一层,直接向进程要内存。
手动内存管理实践
拿到了进程下放的内存后,我们又该如何管理了?其实很简单,借鉴[抄]!
思路也比较简单,仿照 C 语言内存管理,即手动管理,将拿到的大块内存(Area)作为内存资源缓存在程序中,然后需要内存时,向 Area 请求(Alloc)内存,待内存使用完毕后,调用 Area 的 Free 方法将内存放入 Area 中。
实际上,这种方式几乎就是 arena: new package providing memory arenas 提案的简单实现方式了。
现在,急需解决的问题是:Area 如何管理这一大块内存?
First-fit
我们先选择一种简单的管理方式,通过链表来管理,示意图如下:
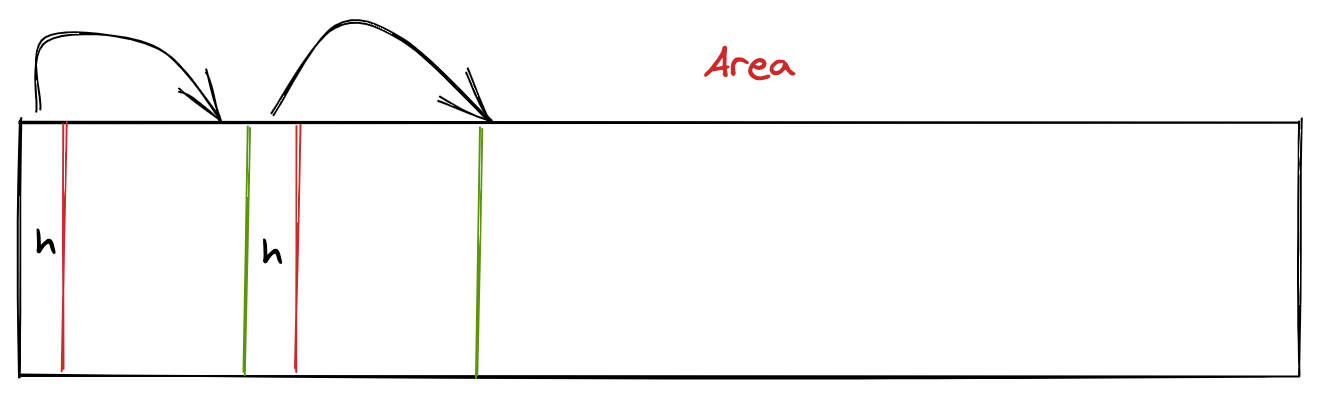
具体的方案为:
- 将 Area 分成很多小块,每小块都有一个头部(header)来存储元数据,比如:该块是否使用,块大小,并且头部中还有一个 next 指针指向下一个可分配的块;
- 调用 Area.Alloc 时,从内存起始地址依次沿链表寻找,当找到一个大小合适且未被使用的内存块时,返回该块的地址即可;
- 调用 Area.Free 时,拿到被回收块的 header,将其标记为可用。
将其翻译为代码,对于 Alloc,接受 size 参数,即分配内存的大小;然后判断 Area 是否还有可用内存,没有则直接返回错误,然后拿到 Area 的首地址,依次向后搜索,找到第一个大小合适,且未分配的块,找到后将该块标记为已用,并将 next 指针指向下一块。
type header struct {
size int // 块大小
allocated bool // 是否分配
next *header // 下一块
}
func (m *Area) Alloc(size int) (unsafe.Pointer, error) {
if m.allocated+size+headerSize > m.size {
return nil, fmt.Errorf("can't alloc any more")
}
h := (*header)(unsafe.Pointer(m.addr))
// 如果内存已分配,且大小不够,则下一个
for h.allocated || h.size < size {
h = h.next
}
// 没有找到可用的 block
if h == nil {
return nil, fmt.Errorf("can't alloc any more")
}
prevSz := h.size
cur := unsafe.Pointer(h)
p := unsafe.Pointer(uintptr(cur) + uintptr(headerSize))
// 下一个
hdr := (*header)(unsafe.Pointer(uintptr(cur) + uintptr(headerSize) + uintptr(size)))
hdr.size = prevSz - size - headerSize
h.size = size
h.allocated = true
h.next = hdr
m.allocated += size + headerSize
m.blocks++
return p, nil
}
对于 Free 函数则要简单的多,通过指针操作(指针偏移)拿到块 header 后,将 allocated 标记为 false 即可。
func (m *Area) Free(p unsafe.Pointer) error {
h := (*header)(unsafe.Pointer(uintptr(p) - uintptr(headerSize)))
if !h.allocated {
return fmt.Errorf("can't free %x twice", p)
}
h.allocated = false
m.allocated -= h.size + headerSize
m.blocks--
return nil
}
这种简单的内存管理方式被称为 First-fit,此外还有 Best-fit,Next-fit 等一些列的分配算法。不过这些算法都不够好用,举例来说:
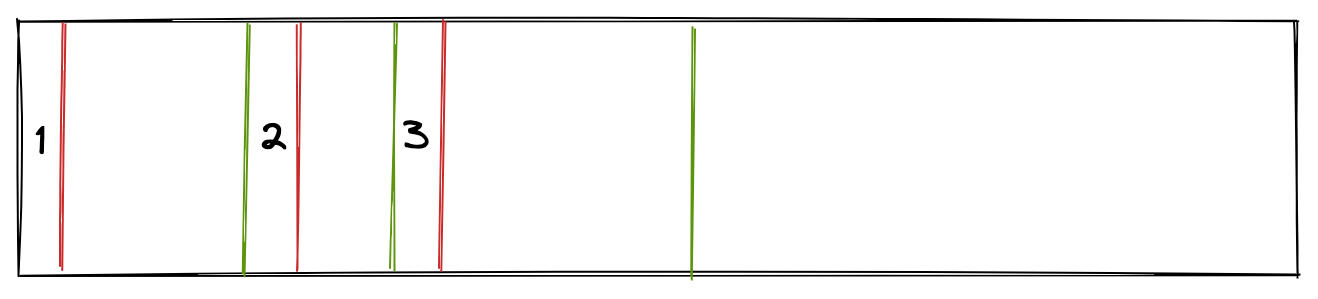
如图所示,块 1 较大,50 字节,块 2 较小,20 字节,且都已经被分配;一段时间后,块 1 被释放了,而此时 Alloc 又被调用了,但只需 10 字节的内存,按照 First-fit 的原则,那么块 1 就应该被返回,那就意味着有 40 字节的内存时被浪费的。
还比如,在一些场景中,小内存的分配很频繁,如下:
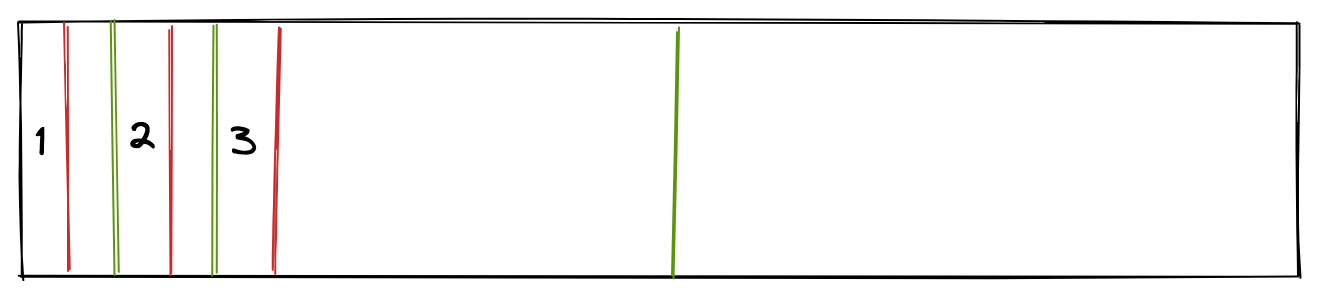
由于小内存的块很小,比如 10 字节,而块的头部 header 也是需要占内存的,这样会显得头重脚轻,大量的内存都被用于存储元数据了,也会造成内存浪费。等等,First-fit 内存分配算法的问题很多,当然也因为它最够简单,所以也是学习内存管理必经的一步。
tcmalloc
如何实现更好的内存管理方式呢?思路很简单,借鉴[抄]。
前面在内存分配原理中,我们提到 malloc/free 有多种优秀的内存管理实现,比如 tcmalloc 就是 Google 开源的一款内存分配器。tcmalloc 全程 thread cache malloc,即核心思想就在于线程缓存,当然 tcmalloc 优秀的设计不止这一点,主要如下:
- tcmalloc 对内存以页为基本单位,每个向进程申请内存时,至少申请 1 页内存;
- tcmalloc 小、大对象内存分配策略不同,小内存的块大小固定,如 8 字节、16 字节、32 字节等,每个页都装满了相同尺寸的块,当调用 Malloc 时,会按照参数计算合适的块大小,然后去页中拿到空间块返回;对于大内存,就没有与之对应的块,而是直接按照页来分配;
- tcmalloc 适合多线程下的内存分配场景,每个线程都有一定量的内存缓存,当申请这些内存时,无需加锁,而是直接通过缓存拿到,这样减少了数据竞争,提升了分配性能;
tcmalloc 的架构比较复杂,这里笔者会简单介绍它的核心概念以及实现,感兴趣的同学可以点开这里慢慢了解。
tcmalloc 对内存块进行了分类(class),同一个 class 的块内存大小是一样的,这样就不用在 header 中记录每个块的大小了,另外 tcmalloc 通过 freelist(空闲链表) 的方式来连接内存块,如下:
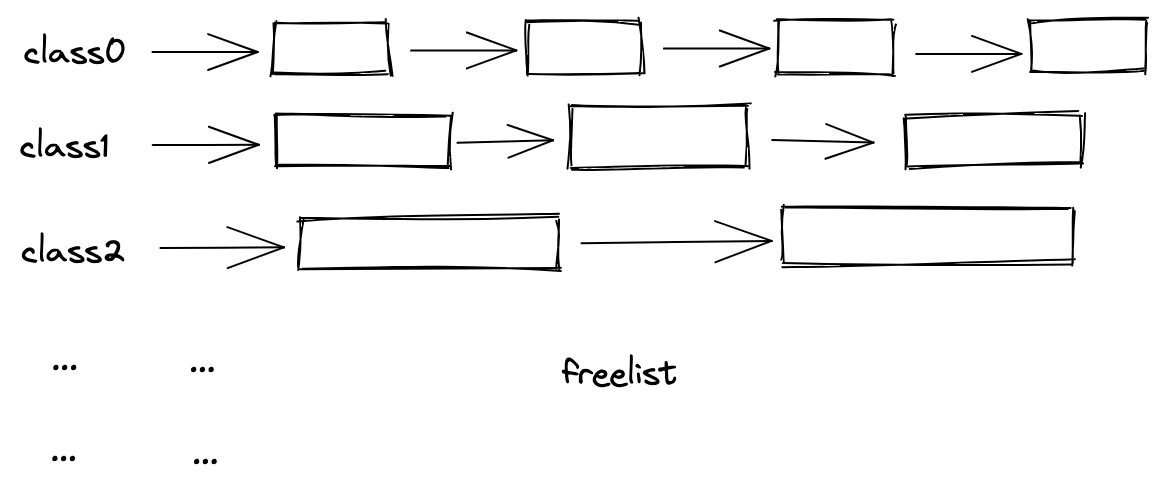
如图所示,对于 class0,其大小 8 字节,那么它所对应的 freelist 中的每一个内存块都是 8 字节;freelist 本身是一个页,被组织为一个单向链表,当内存分配时,从 freelist 中拿出(pop)一个块返回,块无需再与其它块链接,因此整个块都是可用内存,没有元数据浪费。
但是这也会引出一个问题,调用 Free 的时候,块又该放回那个 freelist 呢?
tcmalloc 定义每个页都有一个 ID,这个 ID 不是 tcmalloc 直接分配的,而是按照页的首地址算出来的,因此就每个块的首地址除以页大小就能得到对应的页 ID:
pageNum := p / pageSize
这样就能拿到对应的页,也能找到对应的 freelist。
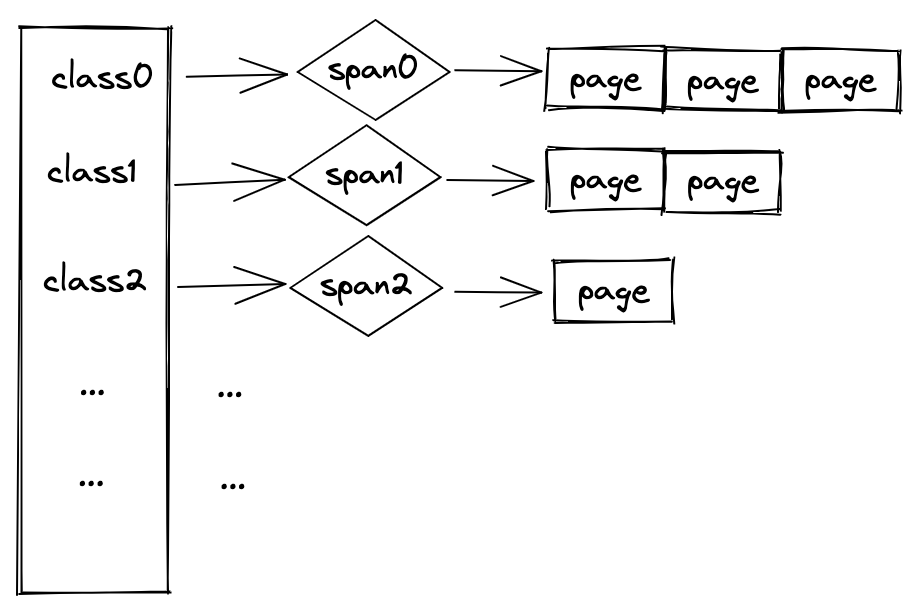
内存分配的场景十分复杂,如果某个 class 的内存块被大量申请,一个页很快就会被用完,因此 tcmalloc 引入了 span 这个概念。
span 由一个或多个页组成,而且这些页是连续的,且这些页的 class 是一样大的,span 也会有一个固定的 class 大小,如下:
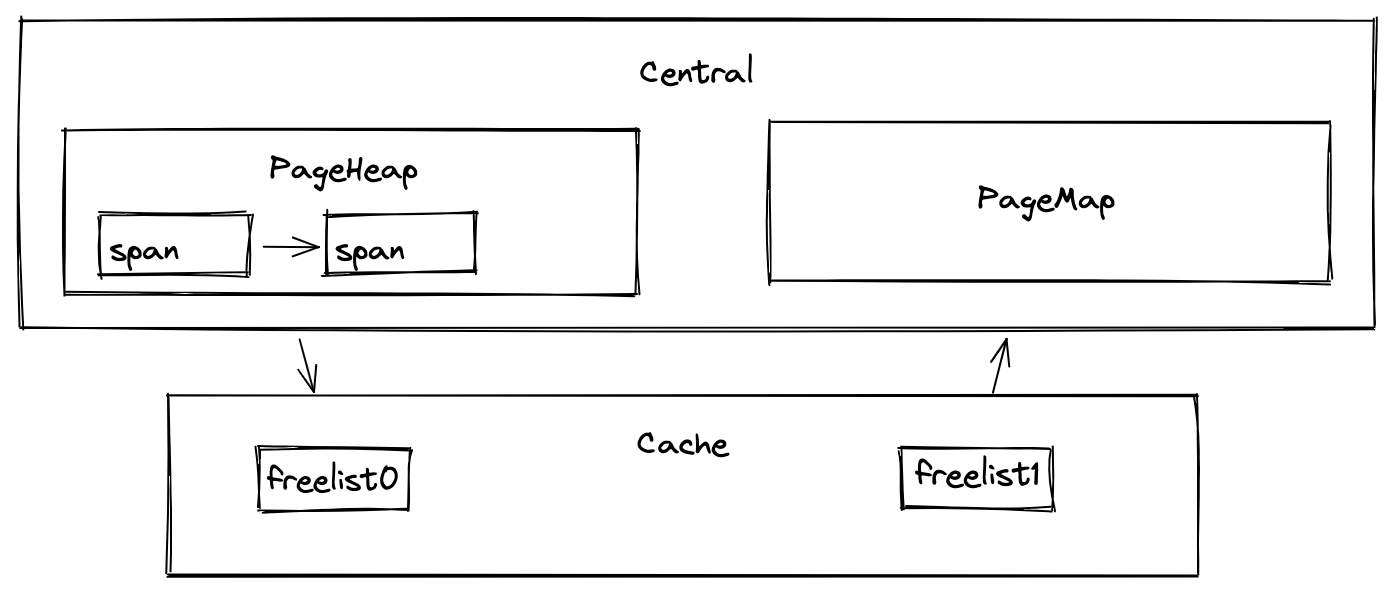
最后回到 tcmalloc 最重要的一环上来,那就是缓存(cache),当一个线程申请内存的时候,会优先去缓存(cache)中去拿,如果缓存中没有的话,才去请求全局内存(central)。central 管理着全局内存,由它负责向进程申请内存,然后将内存拿到后放入 PageHeap 和 PageMap 中管理,这里又引入了两个新的概念:
- PageHeap:页堆,存储 central 所申请的页内存;
- PageMap:页表,存储页 ID 与 span 之间的映射关系。
当 cache 向 central 申请内存时,central 会优先从页堆中拿出空闲页返回,如果没有空闲页再向进程申请;当内存块释放时,拿到页 ID 后,通过 PageMap 查询到对应的 span 后,将内存块放回 span,这样 Free 的工作就完成了。
central、cache、PageMap、PageHeap 的关系如下:
介绍完 tcmalloc 的核心概念和原理后,我们再来看看如何用 Go 实现 tcmalloc。这里说明,由于在 Go 中没有提供线程缓存的 API,我们无法使用线程缓存,所以实现中定义的 Cache 仅仅只能模拟出 Cache 的机制,而无法发挥线程缓存的作用。
对于内存开辟(Malloc),实现如下:
// Malloc 分配内存
func Malloc(size int) uintptr {
if size <= 0 {
return 0
}
// 小对象
if size <= smallObjectSize {
// 计算 size 对应的 class
class := size2Class(size)
obj, err := threadCache.getObject(class)
if err != nil {
log.Printf("malloc err: %s", err)
return 0
}
if obj == nil {
return 0
}
return uintptr(unsafe.Pointer(obj))
}
// 大对象
numPages := (size-1)/pageSize + 1
globalLock.Lock()
defer globalLock.Unlock()
s, err := globalPageHeap.getSpan(numPages)
if err != nil {
log.Printf("malloc err: %s", err)
return 0
}
s.state = allocatedLarge
return s.pageStart
}
和刚才谈到的一样,对象分配有两种情况;对于小内存,计算出对应的 class 后直接去线程缓存 threadCache 中去拿即可,对于大内存,则是直接计算出页个数去全局的 PageHeap 中拿到内存。
这里麻烦的是 threadCache.getObject(class) 函数,因为它实际上是一条很长的链路,如下:

首先,cache 会先判断缓存中是否有可用的块内存,如有直接返回;若没有,则需向 central 申请,若 central 有则返回,否则还需向进程申请,然后返回。
对于内存释放(Free),过程相对简单一些,实现如下:
// Free 释放内存
func Free(p uintptr) {
if p == 0 {
return
}
// 先获取对应的 span
pageNum := p / pageSize
addr := globalPageMap.get(int(pageNum))
if addr == 0 {
return
}
s := (*span)(unsafe.Pointer(addr))
// 无需再次释放
if s.state == free {
return
}
// 小对象,回收至缓存
if s.state == allocatedSmall {
threadCache.insert(s.objectClass, (*object)(unsafe.Pointer(p)))
return
}
// 大对象直接放回 pageHeap
globalLock.Lock()
defer globalLock.Unlock()
s.coalesce(globalPageHeap)
err := globalPageHeap.insertSpan(s)
if err != nil {
log.Printf("free err: %s", err)
}
}
为了避免二次释放,所以会先判断对应 span 的状态;如果是小对象,直接插入回 cache 中,方便下次分配;对于大对象,前面说到大对象是按页来分配的,因此是无法插入会 cache 的,只能将其重新插入 PageHeap。
由于 tcmalloc 的实现细节还有很多,比如:
- 页之间的分裂与合并;
- span 之间如何链接;
- PageMap 如何存储页 ID 和 span 之间的映射;
这些内容比较多,放在这里一一细讲会浪费很大的篇幅,因此这里选择略过,感兴趣的可以查看源码。当然笔者的实现略显粗糙,暂时无法应用在实际场景,你也可以直接阅读 tcmalloc 的源码。
最后,我们来测试一下 tcmalloc:
func TestFree4(t *testing.T) {
assert := assert.New(t)
pointers := make([]uintptr, 0, 1000)
for i := 0; i < 1000; i++ {
p1 := Malloc(100)
assert.NotEqual(int(p1), 0)
t.Logf("%d\n", p1)
pointers = append(pointers, p1)
}
for i := 0; i < 1000; i++ {
Free(pointers[i])
}
}
自动内存管理实践
现在,手动内存管理将告一段落了,下面的内容,我们将谈谈如何实现自动内存管理,也就是上面谈到的 GC 实现。
之所以在自动内存管理放在手动内存管理的后面,那是因为自动内存管理依赖于手动内存管理,就比如 Java 的 GC 实际还是依靠 malloc/free 来实现的,只不过这些由 GC 算法来自动调用,解放了我们的双手。
我们刚才实现了两个版本的 malloc/free,已经对内存管理有了一定的认识与理解,对这种机械式的内存管理方式,我们现在需要改造它。
提一下:实际上 Go 本来就有 GC,那为什么还要再谈 GC 实现了?主要是笔者一直觉得 GC 虽然好,但是隐藏了太多的内存细节,而这些细节有时候又很重要,因此才写下这篇文章来龙去脉的来谈谈内存管理。
在前面的自动管理处,笔者曾说过,Lisp 是第一个用上 GC 的语言,且其算法是标记清理算法(Mark-sweep)。Mark-sweep 易懂,而且十分的经典,虽然目前有很多的 GC 算法实现,但或多或少保留着它的影子,包括 Go 的 GC 算法——三色标记法。
Mark Sweep(标记清理法)
因此,我们首先来谈谈 Mark-sweep 算法是如何实现的?
这里我们需要先引入几个概念。
一、可达性
程序在运行时,会产生大量的垃圾对象,GC 算法需要找到这些垃圾对象然后才能清理。那么如何定义对象是否为垃圾呢?大多数 GC 实现都采用可达性分析来判断对象是否存活,如果存活则保留,非存活则当成垃圾回收。
二、GC roots
如果将程序对象视为一个网状图,判断对象是否可达实际就是在图中搜索出路径不可达的对象,而图的搜索需要一个起点,这个起点就被称作 GC roots。
如下图所示,是一个简单程序的对象分布图:
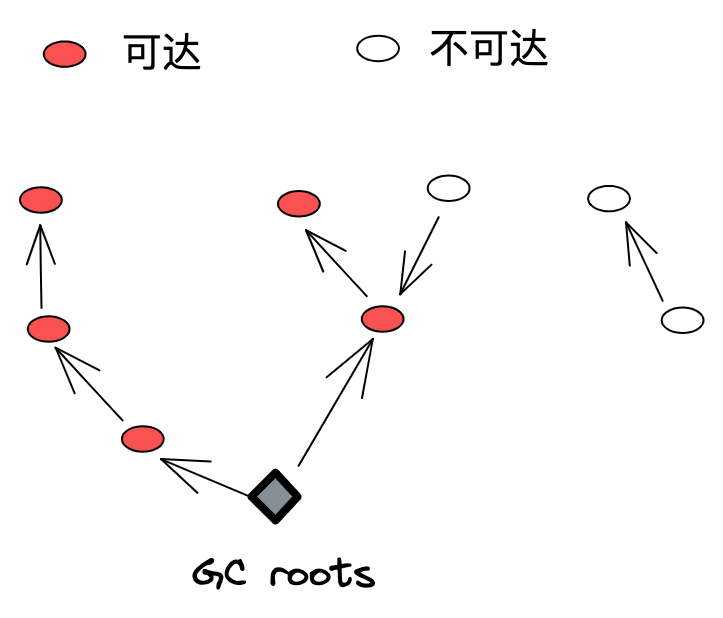
图中底部的菱形图标就是 GC roots,从 GC roots 出发,遍历对象图,红色圆圈表示可达,白色圆圈为不可达。
GC roots 主要有如下几类对象:
- 寄存器变量;
- 局部变量;
- 全局变量;
- 。。。
当 Mark-sweep 开始工作时,从所有 GC roots 出发,沿着连接搜索图中对象,将可达队对象依次标记(Mark 阶段),标记完成后,将所有不可达的对象全部清理掉(Sweep 阶段)。工作流程如下图所示:

下面,我们来看看如何实现 Mark-sweep 算法。首先,我们定义通用对象结构体 Object:
// ObjectType 对象类型
type ObjectType int
const (
// ObjInt int 对象
ObjInt ObjectType = iota + 1
// ObjPair 元组对象
ObjPair
)
// Object 对象
type Object struct {
typ ObjectType // 8
next *Object // 8
marked bool // 8
inner interface{} // 16
}
Object 用于表示任意对象,如 integer 对象,或者 pair 对象;它有 4 个字段:
- typ:对象类型;
- next:指向下一个对象的指针,所有对象由链表连接;
- marked:标记对象是否存活;
- inner:真正的数据,如:integer 对象,inner 可能为 998。
这样每个新建的对象都有类型、标记、连接等元数据信息,next 指针会将所有对象连接成一个大链表,方便在清理阶段找到不可达(mark 为 false)对象,然后将其清理掉。
提一点:在 GC 阶段,对象图之间的连接不是 next 指针,而是对象之间的相互引用,next 指针是为了跟踪所有的对象。
同时,我们定义一个 VM 结构体用于对象分配、GC 等,VM(虚拟机)是实现 GC 最重要的数据结构,它主要由如下功能点:
- 负责新建对象、维护对象之间的引用关系;
- 负责管理所有对象,维护对象个数等信息;
- 负责实时监控对象数据信息,在合适的时间触发 GC。
定义如下:
type VM struct {
numObjects int // 当前对象个数
maxObjects int // 最大对象个数,超过这个值则触发GC
link *Object // 对象链表,所有分配对象通过链表连接
stack [stackMax]*Object // 栈,用栈来模拟 GC roots
stackSize int // 当前栈大小
}
字段说明都已注明,这里仍需简单说一下:
- GC roots 的范围是比较广的,由于我们没有重新实现一门语言,因此寄存器、局部变量、全局变量这些数据是追踪不到的,因此这里选择使用栈来模拟 GC roots,即在栈上的变量都是 GC roots;实际上很多带虚拟机的语言实现基本也是这个思路;
- 对于 GC 的触发机制,这里选择最简单的数量阈值触发,当对象个数超过了阈值,则触发;
另外由于 link、next 指针是为了将所有对象连接起来,因此对象之间的引用关系,即对象图中的路径连接,就需要新的机制来模拟,这里我们引入了元祖(Pair)类型:
type Pair struct {
head *Object // 头
tail *Object // 尾
}
通过 Pair 对象中的头、尾指针来模拟对象之间的引用,Pair 本身也是一个对象,每一个 pair 对象会引用另外两个对象。
新建对象都必须通过 VM 来操作,VM 向 tcmalloc 申请内存后,将其加入到全局链表并入栈,这样对象不仅可以通过链表被找到,同时也是 GC roots。如下:
// 对象入栈,加入 GC roots
func (v *VM) push(value *Object) {
v.stack[v.stackSize] = value
v.stackSize++
}
// 整数对象入栈
func (v *VM) pushInt(n int) {
obj := v.newObject(ObjInt)
obj.inner = n
v.push(obj)
}
// 新建对象,调用 tcmalloc,并加入全局链表,然后返回
func (v *VM) newObject(typ ObjectType) *Object {
if v.numObjects == v.maxObjects {
v.GC()
}
addr := tcmalloc.Malloc(objSiz)
obj := (*Object)(unsafe.Pointer(addr))
obj.typ = typ
obj.next = v.link
obj.marked = false
v.link = obj
v.numObjects++
return obj
}
这里,VM 分别为 int、pair 类型提供对应的新建、入栈 API;对于 int 类型,分配内存、加入全局链表后即可入栈,而 pair 对象则相对麻烦一点,需要从栈顶弹出两个对象然后再入栈:
// 元组对象入栈,先从栈中pop出两个对象,建立关联后再入栈
func (v *VM) pushPair() *Object {
obj := v.newObject(ObjPair)
addr := tcmalloc.Malloc(pairSiz)
pair := (*Pair)(unsafe.Pointer(addr))
pair.head = v.pop()
pair.tail = v.pop()
obj.inner = pair
v.push(obj)
return obj
}
这样,两个对象之间就存在引用关系,即使二者不在栈中,仍可通过图扫描被找到。而那些既不在栈中,也没法通过扫描找到的对象,自然就是垃圾对象,它们将会被回收。因此,VM 提供了 pop 来让一个对象出栈,从而就不再是 GC roots 了。
// 栈顶对象出栈,不再是 GC roots
func (v *VM) pop() *Object {
v.stackSize--
return v.stack[v.stackSize]
}
下面则是 mark-sweep 算法的具体实现了,在标记阶段,从每个 GC roots 开始,标记它们所有可达的对象,如下:
// 标记所有 GC roots 及可达对象
func (v *VM) markAll() {
for i := 0; i < v.stackSize; i++ {
v.stack[i].mark()
}
}
// 标记对象
func (o *Object) mark() {
if o.marked {
return
}
o.marked = true
if o.typ == ObjPair {
p := o.inner.(*Pair)
p.head.mark()
p.tail.mark()
}
}
栈中所有对象都是 GC roots,如果是 int 对象,直接设置 mark 为 true 即可,而如果是 pair 对象则还需标记它的两个头、尾指针;头、尾指针虽然不在栈中,但它们是 GC roots 可达的,标记完成后,剩余的对象就是不可达的,我们调用 sweep 将其清理掉:
// 清理
func (v *VM) sweep() {
obj := v.link
for obj != nil {
if !obj.marked {
unreached := obj
obj = unreached.next
addr := uintptr(unsafe.Pointer(unreached))
tcmalloc.Free(addr)
v.numObjects--
} else {
obj.marked = false
obj = obj.next
}
}
}
由于所有对象都会连接在全局链表 link 上,sweep 从 link 的头节点开始遍历,如果对象未被标记则表示不可达,因此将其 Free 掉,如果对象可达,则跳到下一个链表节点,这样扫描完毕后,垃圾也会被清理完毕。
最后,将标记、清理放在一起:
func (v *VM) GC() {
numObjects := v.numObjects
if numObjects == 0 {
return
}
// mark
v.markAll()
// sweep
v.sweep()
if v.numObjects == 0 {
v.maxObjects = initialGCThreshold
} else {
v.maxObjects *= 2
}
fmt.Printf("Collected %d objects, %d remaining.\n",
numObjects-v.numObjects, v.numObjects)
}
至此,一个简单的 mark-sweep 算法已经实现完毕,当然 GC 一般都是被动触发的,这里选择将触发时机放在 newObject 中:
func (v *VM) newObject(typ ObjectType) *Object {
if v.numObjects == v.maxObjects {
v.GC()
}
// ....
}
当目前对象个数超过了阈值后,就会触发 GC,而且阈值也会随着运行情况而改变(见 GC 函数)。
简单测试一下 mark-sweep 算法:
func TestVM_GC4(t *testing.T) {
assert := assert.New(t)
vm := NewVM()
vm.pushInt(1)
vm.pushInt(2)
a := vm.pushPair()
vm.pushInt(3)
vm.pushInt(4)
b := vm.pushPair()
// 改变a,b的引用,不再指向 2,4,因此2,4就变成了垃圾
a.inner.(*Pair).tail = b
b.inner.(*Pair).tail = a
// 此时已分配 6 个对象
assert.Equal(vm.numObjects, 6)
vm.GC() // GC
assert.Equal(vm.numObjects, 4) // 2,4 被回收了
vm.Free()
}
在这个例子中,vm 新建了 6 个对象,但栈中只有 2 个 GC roots,其他 4 个则是引用可达,最后改变 a,b 的引用,不再引用 2,4,它们也就成了垃圾,当调用 GC 时,会被回收掉,对象就剩 4 个了。
显然,自动内存管理的本质仍是 malloc/free 两个函数,只是它们不再由用户主动调用,而是由 GC 算法选择合适的时机来调用。
tricolor(三色标记法)
mark-sweep 算法简单易理解,但却有一个很大的问题:mark 和 sweep 这两个阶段必须先后进行,且不可被打断,而且必须 STW。
因此,STW 的时间肯定比较长,一个程序长时间暂停服务肯定是不被允许的,因此 mark-sweep 有非常多的改进版本,其中一个非常著名的改进算法,也是 Go 采用的 GC 算法——三色标记法。
下面,我们就一起来看看三色标记法(tricolor)。
三色标记法是标记清理法的一个改进算法,主要目的是将标记阶段分开成多个小阶段,每个小阶段都可以完成一部分标记工作,待全部标记完成后再来一次清理。
由于标记阶段占用了 GC 的大量时间,这样就能显著地降低标记 STW 时间。
三个标记法将对象抽象为 3 种三种颜色:
- 黑色:对象已经扫描,且其引用对象也已经扫描
- 灰色:对象已经扫描,但其引用对象未被扫描
- 白色:对象未被扫描
颜色抽象是这样将标记阶段分为多阶段的:
- 使用一个栈专门用来存储灰色对象,被称为灰色栈(grayStack);
- 开始标记时,所有对象都是白色的,GC roots 是可达的,将 GC roots 标记为灰色,并入栈;
- 依次将对象从栈顶出栈,找到出栈对象的所有引用,将引用对象入栈,然后将出栈对象标记为黑色;
- 重复步骤 3,直到栈中再无灰色对象,则代表所有可达对象都被标记为黑色;
- 剩下的白色对象都是垃圾对象,等待回收清理。
整体流程如下图所示:

这样灰色对象由栈来管理,一次性的扫描就可以通过栈来分为多次,待栈为空时,则扫描完毕。
因此,我们为 VM 结构体添加一个灰色栈:
type VM struct {
numObjects int
maxObjects int
link *Object
stack [stackMax]*Object
stackSize int
grayStack [grayMax]*Object // 灰色栈
grayCount int
}
GC 函数也会有相应的改造:
func (v *VM) GC() {
// ...
// mark
v.markRoots()
// traceReference 跟踪灰色对象
v.traceReference()
// sweep
v.sweep()
// ...
}
GC 分为了三个阶段:
- markRoots:标记所有 GC roots 对象为黑色,将其引用对象入栈;
- traceReference:跟踪栈中的灰色对象,依次出栈,然后将其引用对象入栈,注意:这一步是可以多批次进行的;
- sweep:清理掉不可达的白色对象。
实现分别如下:
func (v *VM) markRoots() {
for i := 0; i < v.stackSize; i++ {
v.markObject(v.stack[i])
}
}
仍然将栈(不是灰色栈)中对象作为 GC roots;
func (v *VM) traceReference() {
for v.grayCount > 0 {
v.grayCount -= 1
object := v.grayStack[v.grayCount]
// 出栈,然后搜索连接对象
v.blacken(object)
}
}
跟踪灰色栈中的对象,将其引用对象入栈,且颜色变为黑色:
func (v *VM) blacken(o *Object) {
if o.typ == ObjInt {
return
}
if o.typ == ObjPair {
p := o.inner.(*Pair)
v.markObject(p.head) // 入栈
v.markObject(p.tail) // 入栈
}
}
func (v *VM) markObject(o *Object) {
o.mark()
v.grayStack[v.grayCount] = o
v.grayCount++
}
最后,当灰色栈为空时,调用 sweep 函数清理白色对象:
func (v *VM) sweep() {
obj := v.link
for obj != nil {
if !obj.marked { // 未被标记的,就是白色对象
unreached := obj
obj = unreached.next
addr := uintptr(unsafe.Pointer(unreached))
tcmalloc.Free(addr)
v.numObjects--
} else {
obj.marked = false
obj = obj.next
}
}
}
至此,一个简单版的三色标记算法就被实现出来了,我们来测试一下:
func TestVM_GC2(t *testing.T) {
assert := assert.New(t)
vm := NewVM()
vm.pushInt(1)
vm.pushInt(2)
vm.pop()
vm.pop()
vm.GC()
assert.Equal(vm.numObjects, 0)
vm.Free()
}
这里,vm 新建了对象 1,2,但都不是 GC roots,且不可达,因此 GC 后,对象个数为 0。
灰色栈的机制巧妙地将灰色标记分成了多阶段,而且黑色、灰色、白色并不是严格意义上的颜色标记,未标记的对象自然是白色,标记了且在灰色栈中的对象是灰色,标记了且出栈的对象才是黑色对象。
Go 内存管理
终于铺垫到了这里,在前面的内容中,我们分别介绍手动内存管理与自动内存管理的原理,在此基础上,实现了手动内存管理的 tcmalloc 以及鼎鼎大名的 GC 算法——三色标记法。
那么为什么要说是铺垫呢?因为 Go 的内存管理的两大核心正是 tcmalloc 和 三色标记 GC 算法。这个局布到这里,是为了让读者更清晰、更直观、更深入地了解 Go 是如何管理内存的。
Go 的内存模块其实非常复杂,虽然它的核心实现是三色标记法,但也大量借鉴了 tcmalloc,如果一开始就直入主题,很多人都会不知所云,笔者最开始就是这样的,因此笔者铺垫了大量的内存、GC 知识,就是为了此刻能够将 Go 的内存管理变得容易理解一些。
Go 的内存管理是一个真正的工业级实现,我们可以简单的将其分为:用户程序(Mutator)、内存分配(Allocator)和垃圾回收(Garbage Collector)三大模块。
下面,我们就来依次看看 Go 是如何实现这三大模块的。
- 内存分配:
在前面的基础上,它引入了屏障技术、三色不变性来实现并发、增量对象标记,
总结
写到这里,笔者不经感叹,这篇文章写的实在是不容易!
由于 Go GC 本身的复杂性。
参考资料
- xmm
- minigc
- crafting interpreters
- golang-garbage-collector
- garbage-collect
- gc impl
- 垃圾回收算法实现之-标记-清除
- A visual guide to Go Memory Allocator from scratch (Golang)
- Gravity— An MMAP Allocator
- go-slab - slab allocator in go
- Discovering and exploring mmap using Go
- The Slab Allocator: An Object-Caching Kernel Memory Allocator
- malloc
- Write a simple memory allocator
- tcmalloc
- golang-memory-allocator
- The Slab Allocator in the Linux kernel
- Linux 内核 | 内存管理——Slab 分配器
- 20 张图揭开「内存管理」的迷雾,瞬间豁然开朗
- 认真分析 mmap